Modellelektronik
Wie ich bereits auf meinen anderen Seiten beschrieben habe, ist es nicht einfach für solche Modelle im Maßstab 1:18 die passenden Komponenten zu finden. Dies gilt insbesondere auch für die elektronischen Baugruppen. Da gibt es Lichtbausteine (viel zu groß), Fahrtregler (entweder ohne BEC und viel zu ruckelig oder viel zu groß) und und und…….
So habe ich mich auch diesem Bereich im Modellbau gewidmet. Da ich beruflich etwas vorbelastet bin, habe ich nach kleinen programmierbaren Bausteinen gesucht, denen man so allerhand Funktionen entlocken kann: kleine Mikroprozessoren. Ich fand passende Prozessoren bei Microchip und Atmel, habe mich allerdings für die Tiny-Serie von Atmel entschieden.
So entstand in einer Reihe von Einzelanwendungen für meine Modelle eine kleine Serie von „Helferlein“ für verschiedenste Lichtfunktionen, Schaltbausteine, Servofunktionen und nicht zuletzt kleine Fahrtregler speziell für meine Kleinmodelle mit exzellenten Fahreigenschaften.
So gibt es einen Tiny für Bremslicht und Rückfahrscheinwerfer, der ein realistisches Licht erzeugt und zur Kombination mit Fahrtreglern gedacht ist die keine Lichtfunktionen haben.
Haben Sie auch schon einmal ein Modell mit z.B. drei Gängen gehabt und wollten noch eine zusätzliche Servoposition für den Leerlauf haben? Der Schalter auf dem Sender hatte aber nur drei Stellungen? Haben auch Ihre Servos in einer Stellung mächtig gebrummt und halten nicht sehr lange?
Dafür habe ich einen „Schaltungs-Tiny“ entwickelt. Bei meinem G-Modell habe ich eine sequentielle Schaltung mit 5 Schaltpositionen realisiert, die mit einem Taster am Sender bedient werden kann, die einzelnen Servopositionen (bis zu sieben sind derzeit möglich) werden im „Schaltungs-Tiny“ gespeichert und abgerufen. Der „Schaltungs-Tiny“ steuert das Servo und der Empfänger steuert den „Schaltungs-Tiny“. Ein wesentlicher Vorteil liegt darin, dass selbst bei Funkstörungen das Schaltservo keine nervösen Zuckungen und heftige Schaltvorgänge im Getriebe (wohlmöglich noch beim Fahren) verursacht. Das dies für Servo und Getriebe schonend ist, liegt auf der Hand. Ein weiterer Vorteil ist das Abschalten der Servos nach dem Schaltvorgang. Dabei werden die Servos mit keinen neuen Steuerinformationen versorgt und die Servos (mit Ausnahme einzelnen Digitalservos) verharren in ihrer derzeitigen Position und werden inaktiv. Damit hört das weit verbreitete Servobrummen auf und der Stromverbrauch wird erheblich gesenkt, was dem Fahrspaß zugute kommt. Bei einem erneuten Schaltvorgang wird das Schaltservo selbstverständlich wieder aktiviert. Im übrigen verlängert das die Lebensdauer eines Servos ganz erheblich.
Ein wesentlicher Entwicklungsschritt ist mein eigener Fahrtregler. Er ist natürlich auf kleine Modelle zugeschnitten und sowohl für den Betrieb von Glockenankermotoren, als auch herkömmliche Eisenankermotoren geeignet. Für Modelle der kleinen Kategorie ist eine Motorstrom von 4A Dauerstrom absolut ausreichend, und mit einer Baugröße von 28x18x8mm inklusive eines kleinen BEC (5V2A bei 2Zellen LiPo) und der Ansteuerung für Brems- und Rückfahrlicht angemessen klein.

Da für mich nicht nur die reine Größe sondern viel mehr die Fahreigenschaften entscheidend sind, hier ein paar Daten:
Schaltfrequenz: 2 bis 32KHz (über die Fernsteuerung programmierbar)
Fahrstufen: 128 vorwärts + 128 rückwärts
Bremse: EMK Bremse dynamisch (4 Quadranten Betrieb)
Motorstrom: 4A Dauer / 6A Kurzzeit < 2s (nicht kurzschlußfest!!!)
Versorgungsspannung: 6..15V
BEC 5V 2A bei Versorgungsspannung < 9V / 1A bei Versorgungsspannung bis 15V
Licht: Bremslicht + Rückfahrscheinwerfer mit je max 500mA
Baugröße: 28 x 18 x 8 mm mit BEC
18 x 18 x 8 mm ohne BEC
Sonderfunktionen: Anfahrhilfe (speziell für Eisenankermotoren), Störimpulsunterdrückung (parametrierbar)
Die Schaltfrequenz bis 32Khz ist insbesondere für Glockenanker Motoren von Bedeutung und ermöglicht ein sehr feinfühliges Fahren. Die 128 Fahrstufen sind auch bei „größeren Fahrtreglern“ keinesfalls Standard und machen insbesondere beim langsamen Rangieren wirklich Sinn. Ebenfalls ist eine Bremse auch in kleinen Modellen sinnvoll. Oder wer hat noch nicht erlebt, dass sein Modell zwar den Hügel langsam herauf fahren kann, aber wenn es bergab geht, muß bereits der Rückwärtsgang bemüht werden, um das Modell vor einem zu schnellen „herunter rasen“ zu schützen. Hier hilft der sogenannte 4 Quadranten Betrieb. Dabei wird der Motor immer, entweder an die Fahrspannung angeschlossen, oder der Motor wird kurzgeschlossen. Dies geschieht im Intervall der eingestellten Schaltfrequenz des Reglers. Somit wird der Motor bergab nicht einfach „laufen gelassen“ sondern gezielt bei der Reduzierung der Leistung am Fahrtregler mit gebremst. Ein Nebeneffekt ist, dass das Modell im Stand ebenfalls „gebremst“ (der Motor kurzgeschlossen) wird und nicht einfach weg rollt.

Inzwischen habe ich noch weitere Lektroniken für meine Modell LKW im Maßstab 1:25 entwickelt.
Da ist zunächst der neue Fahrtregler mit gleichen Abmaßen und den gleichen elektrischen Kennwerten aber mit neuer Programmierung.
Dies wurde Notwendig, da es die Prozessoren, mit denen ich gearbeitet hatte nicht mehr erhältlich sind und die Nachfolgegeneration anders zu programmieren ist. Dabei wurden neben der Erweiterung der Fahrstufen auf 255 je Fahrtrichtung noch ein paar weitere Kleinigkeiten verbessert.
Ein weiterer Punkt ist die Beleuchtung der Modelle. Da ist zunächst das Fahrlicht mit Abblendlicht, Standlicht, Fernlicht, Nebelscheinwerfer, Nebelschlußlicht und Lichthupe. Dann ist da noch der Blinker. Auch der sollte einzeln ein- und ausgeschaltet werden können. Zusätzlich sollte allerdings auch beim Lenken der Blinker mit ausgeschaltet werden können. Dies aber bitte so wie beim Original. Der Blinker soll nur dann ausgeschaltet werden wenn man von der Seite wieder geradeaus lenkt nach der auch der Blinker eingeschaltet ist. Das führt dazu, dass man nach rechts Abbiegen will, da die Kurve aber eng ist erst einmal nach links ausholt und dann nach rechts lenkt. Erst wenn man jetzt wieder geradeaus lenkt geht der Blinker automatisch aus. So soll es sein!
Alles wurde zunächst mit unterschiedlichen Modulen realisiert.
Dies alles gemeinsam mit einem Warnblinker habe ich jetzt in ein einziges Modul gepackt.
Da meine Fahrzeuge auch Anhänger haben und ebenfalls mit Beleuchtung ausgestattet sein sollen, musste ein Weg gefunden werden die Signale vom Zugfahrzeug zum Anhänger zu übertragen. OK da gibt es Infrarotübertragung. Im Modellbau nichts neues, wenn da nicht Funktionen wären, die mich stören und was noch schlimmer ist, die andere Modelle sogar gefährden können!
Wenn man zum Beispiel einen Anhänger hat, der mit einer Feststellbremse ausgestattet ist, die man über die IR Elektronik betätigen kann, wird man diese benutzen um eine abgestellten Anhänger vor dem Wegrollen zu schützen. Kommt jetzt ein anderes Fahrzeug mit der gleichen IR-Elektronik vorbei und hat diese auch eingeschaltet wird unter Umständen die Bremse im abgestellten Anhänger gelöst. Steht der Anhänger jetzt an einem Abhang kann man sich ausmahlen was nun alles geschehen kann. Diese Fahrzeuge haben nicht selten ein nicht unerhebliches Eigengewicht.
Ich habe eine IR-Elektronik enwickelt, die ich über eine Proportionalkanal des Zugfahrzeuges aktivieren und deaktivieren kann. Darüber hinaus reagieren meine IR-Empfänder ausschließlich auf IR-Sender die zunächst bekannt gemacht und eingelernt sind. Ich aktiviere vom Sender aus immer nur einen speziellen IR-Empfänger (repsktive Anhänger). Damit ist diese Gefahr gebannt! Zudem überträgt miene IR-Elektronik nicht nur bis zu 8 Lichtsignale (Licht, Bremslicht, Rückfahrscheinwerfer, Blinker etc.) nahezu in Echtzeit sondern zusätzlich auch bis zu 4 Proportionalkanäle des Zugfahrzeuges zum angewählten Anhänger. Auch dies geschieht ohne Verzögerung und mit voller Auflösung. Es entstehen also keine Unterschiede Zwischen den Signalen im Zugfahrzeug und den zum Anhänger übertragenen Signalen. Somit sind nicht nur Bremsen und Aufliegerstützen möglich, sondern man kann noch ganz andere Einsatzmöglichkeiten finden.
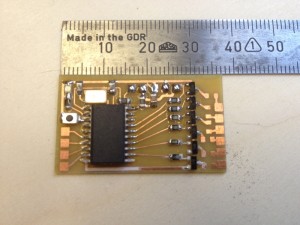
Das ist der Sender 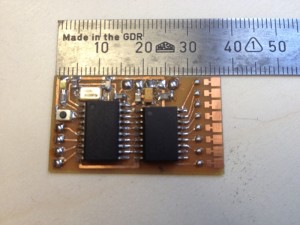
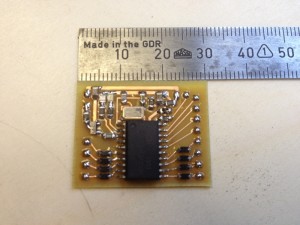
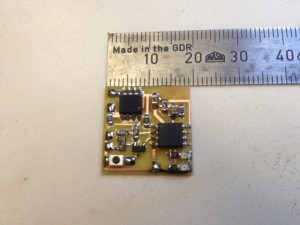
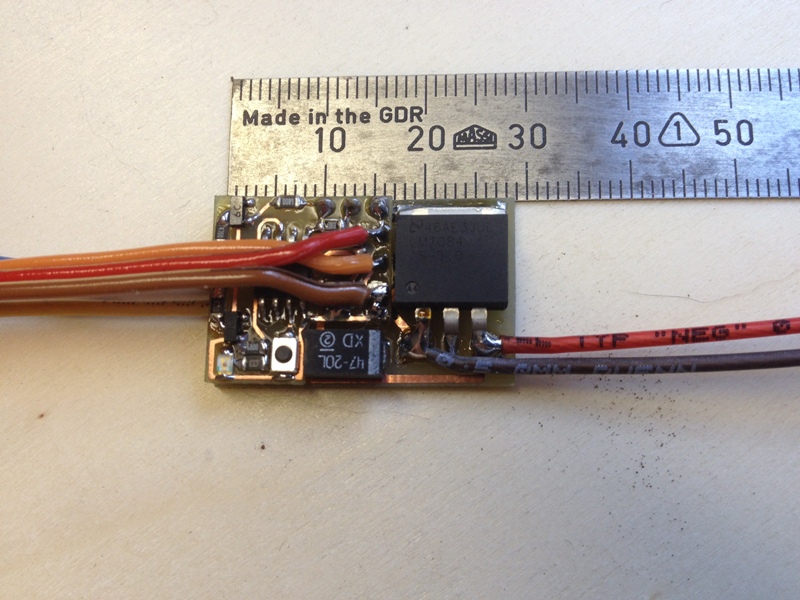
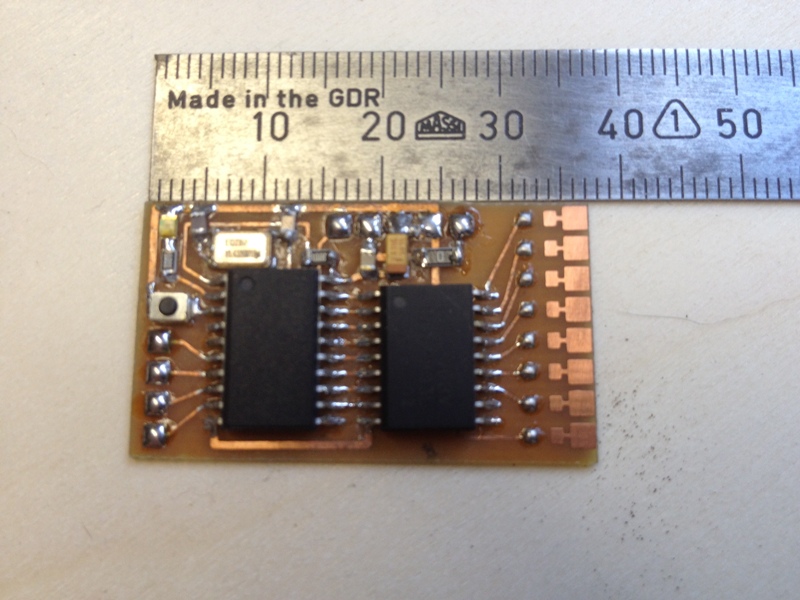
 Und dies sind zwei unterschiedliche Empangsmodule. Das zweite Modul ist entstanden um auch kleine Fahrzeuge mit nur einer LiPo Zelle versorgen zu können. (hier werden nur 6 Lichtsignale übertragen) Ja, auch das Modul überträgt bis zu 4 Propkanäle in Echtzeit!
Und dies sind zwei unterschiedliche Empangsmodule. Das zweite Modul ist entstanden um auch kleine Fahrzeuge mit nur einer LiPo Zelle versorgen zu können. (hier werden nur 6 Lichtsignale übertragen) Ja, auch das Modul überträgt bis zu 4 Propkanäle in Echtzeit!
Da hier auch der Begriff LiPo gefallen ist habe ich mich auch damit beschäftigt. Diese Akkus sind bekanntlich klein, leicht, leistungsstark aber auch empfindlich in der Handhabung. Da ich selbst auch schon „Lehrgeld“ bezahlen durfte und den einen oder anderen LiPo-Akku „getötet“ habe, habe ich dafür ebenfalls etwas entwickelt. Heraus gekommen ist dann soetwas:
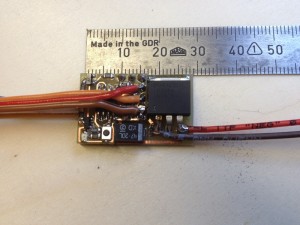
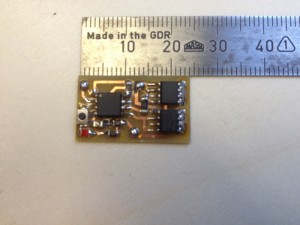
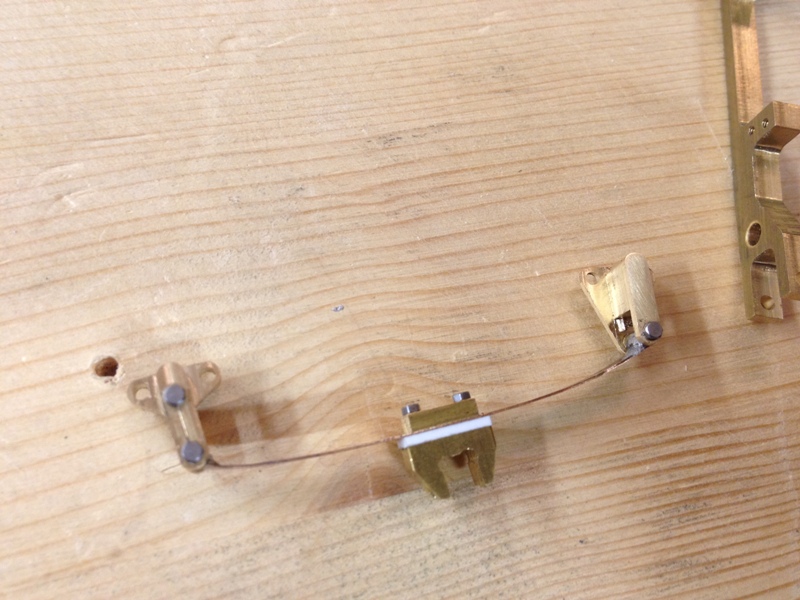
 Das ist ein von mir genannter LiPo-Saver geworden. (hier für einen Einzeller-LiPo) Es ist ein kleines Modul, welches permanent die einzelnen Zellen des LiPo-Akkus überwacht und bei einer Warnschwelle (vor Unterspannung) durch eine Blinkende LED signalisiert, dass der Akku bald wieder aufgeladen werden muss. Da man die LED nicht immer im Blick haben kann, wird bei erreichen der Abschaltschwelle einer der LiPo-Zellen auch der Akku vom Modell getrennt. Ja! Der schaltet AUS! Und das ist auch die zweite Funktion des LiPo-Savers. Er ist gleichzeitig auch der Ein- und Ausschalter des Modelles.
Das ist ein von mir genannter LiPo-Saver geworden. (hier für einen Einzeller-LiPo) Es ist ein kleines Modul, welches permanent die einzelnen Zellen des LiPo-Akkus überwacht und bei einer Warnschwelle (vor Unterspannung) durch eine Blinkende LED signalisiert, dass der Akku bald wieder aufgeladen werden muss. Da man die LED nicht immer im Blick haben kann, wird bei erreichen der Abschaltschwelle einer der LiPo-Zellen auch der Akku vom Modell getrennt. Ja! Der schaltet AUS! Und das ist auch die zweite Funktion des LiPo-Savers. Er ist gleichzeitig auch der Ein- und Ausschalter des Modelles.
Ich finde es eine unmögliche Art auf Modellveranstaltungen seine Modelle eingeschaltet im Parcour stehen zu lassen und dann auf Wanderschaft über die Messe zu gehen, während der sogenannte Akkuwarner im Modell mit lautem Pipen anzeigen will, das der Akku langsam leer ist und ausgeschaltet werden sollte.
Der kleine Knopf links unten ist ein kleiner Taster, den man mühelos an jeder Stelle im Modell unterbringen kann. Den sieht man nicht wirklich und man muß nicht ewig nach irgend einem versteckten großen Schalter fummeln.
Der LiPo-Saver schaltet Leistungen bis zu 12Ampere Modellstrom! In besonderen Fällen sind auch bis zu 30Ampere möglich. Damit sind auch Großmodelle ausreichend versorgt.
Dann ist da noch der kleinste Spross aus meine Fahrtregler Gattung.
 Der versorgt sich aus dem Empfänger und kann zwischen 3 und 5,5V betrieben werden. Er ist genau so feinfühlig wie meine „großen“ Fahrtregler aber erheblich kleiner in den Abmessungen. Ich habe diesen Regler für die bekannten Kleinantriebe mit 3 oder 5V Motoren entwickelt, mit denen man so manche Funktion realisieren kann (Kippspindel, Elektrokran, diverse Nebenantriebe etc.)
Der versorgt sich aus dem Empfänger und kann zwischen 3 und 5,5V betrieben werden. Er ist genau so feinfühlig wie meine „großen“ Fahrtregler aber erheblich kleiner in den Abmessungen. Ich habe diesen Regler für die bekannten Kleinantriebe mit 3 oder 5V Motoren entwickelt, mit denen man so manche Funktion realisieren kann (Kippspindel, Elektrokran, diverse Nebenantriebe etc.)






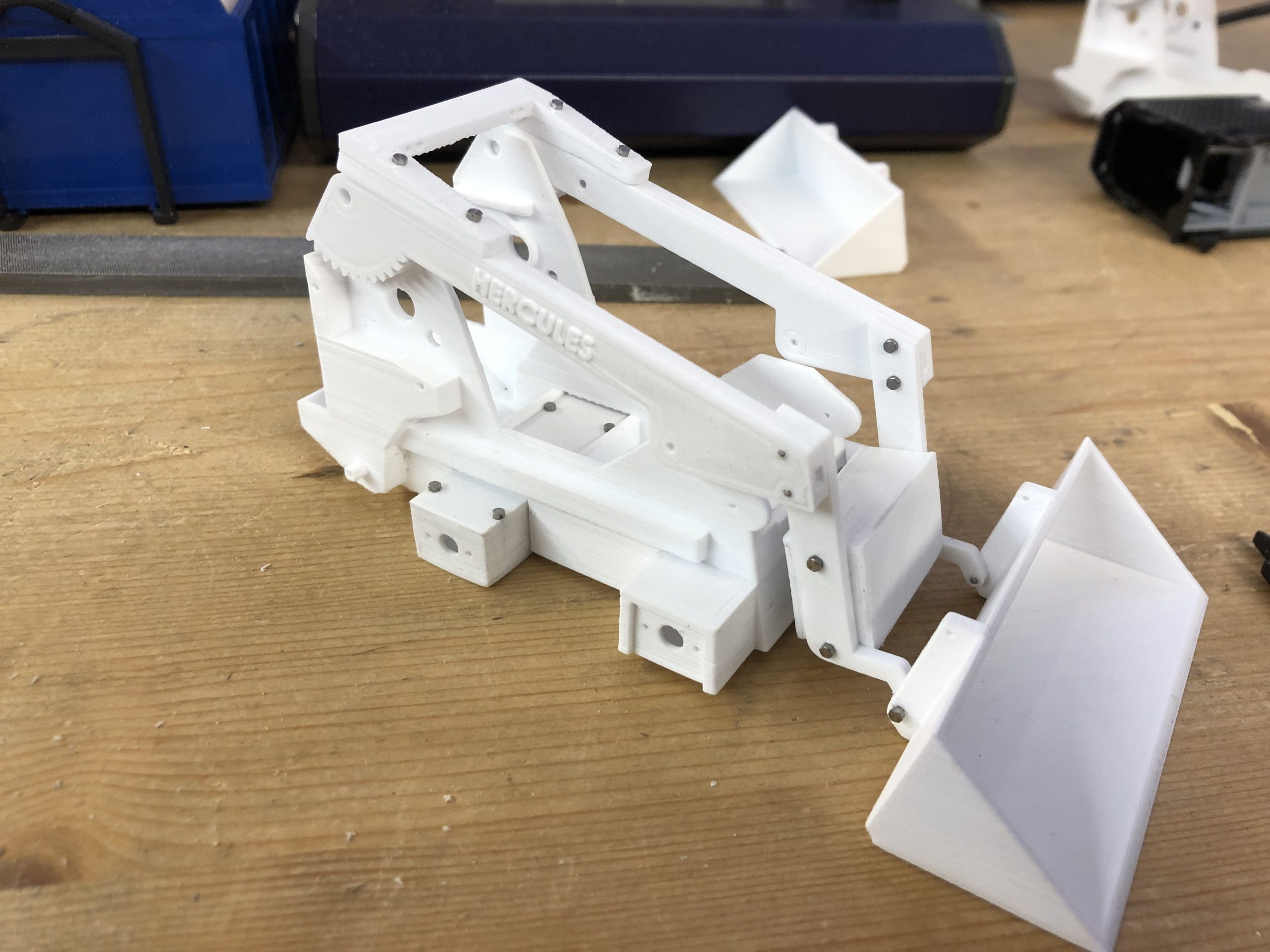
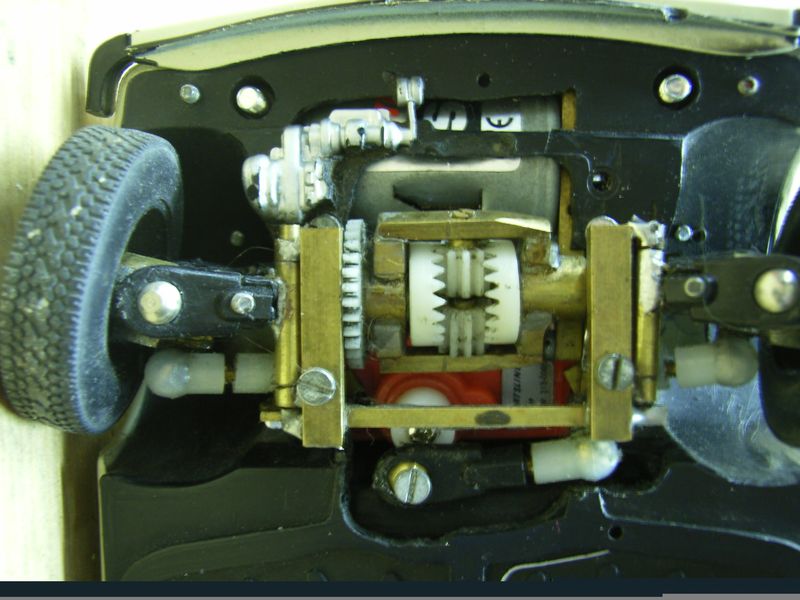
 Schon hier wird deutlich, dass in dem kleinen Modell kaum mehr Platz für irgend etwas stabiles sein kann.
Schon hier wird deutlich, dass in dem kleinen Modell kaum mehr Platz für irgend etwas stabiles sein kann. 
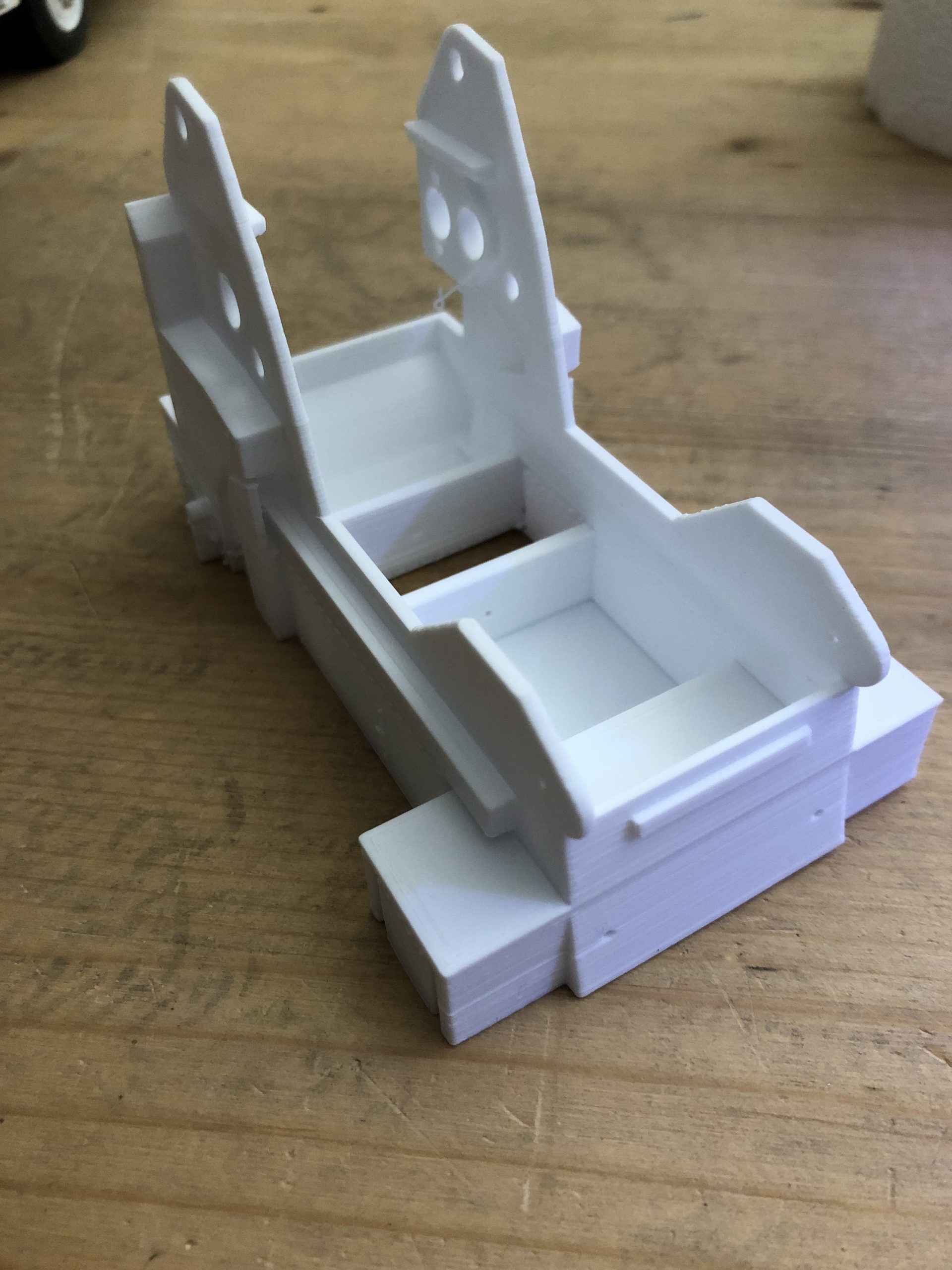





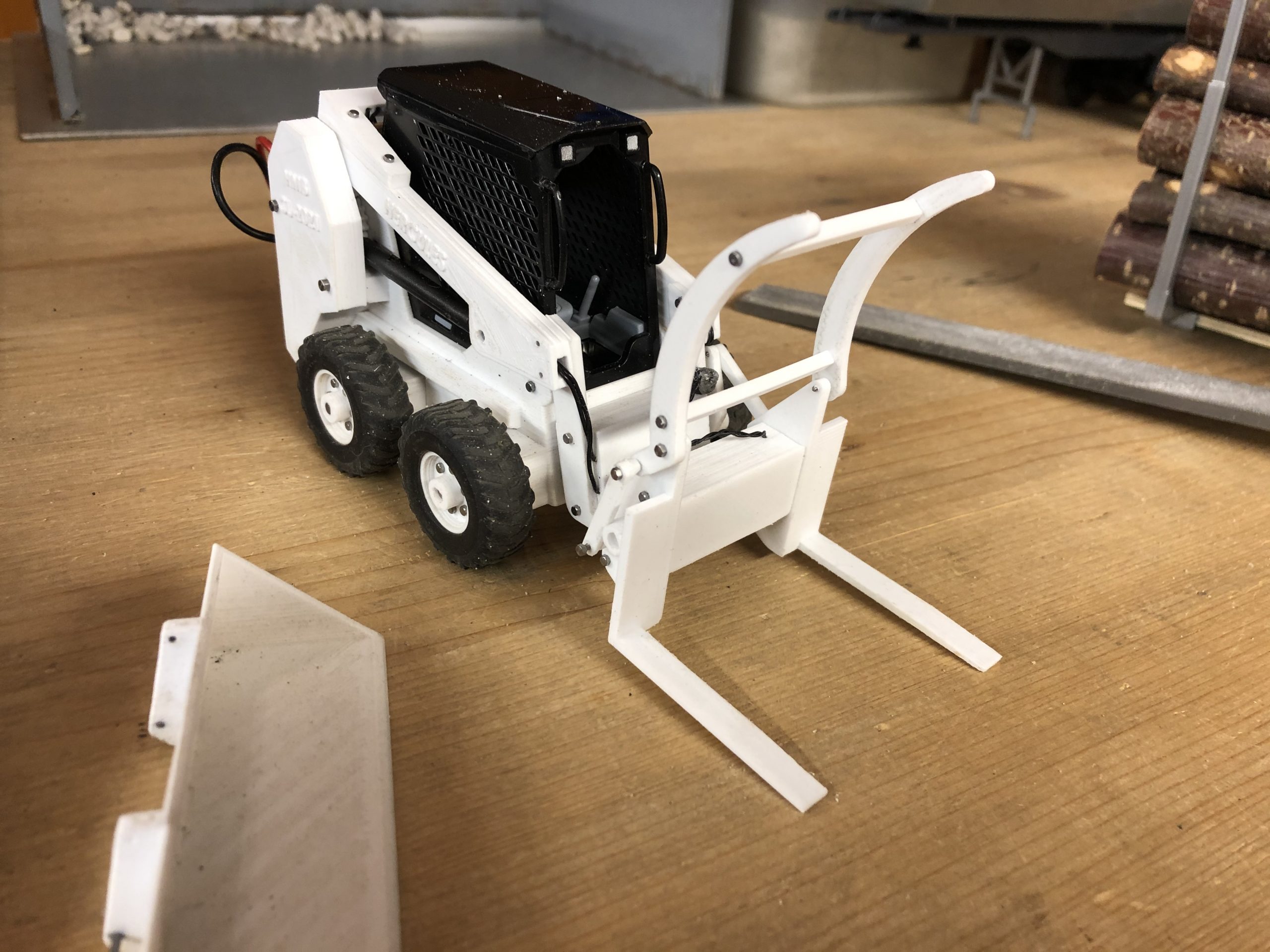
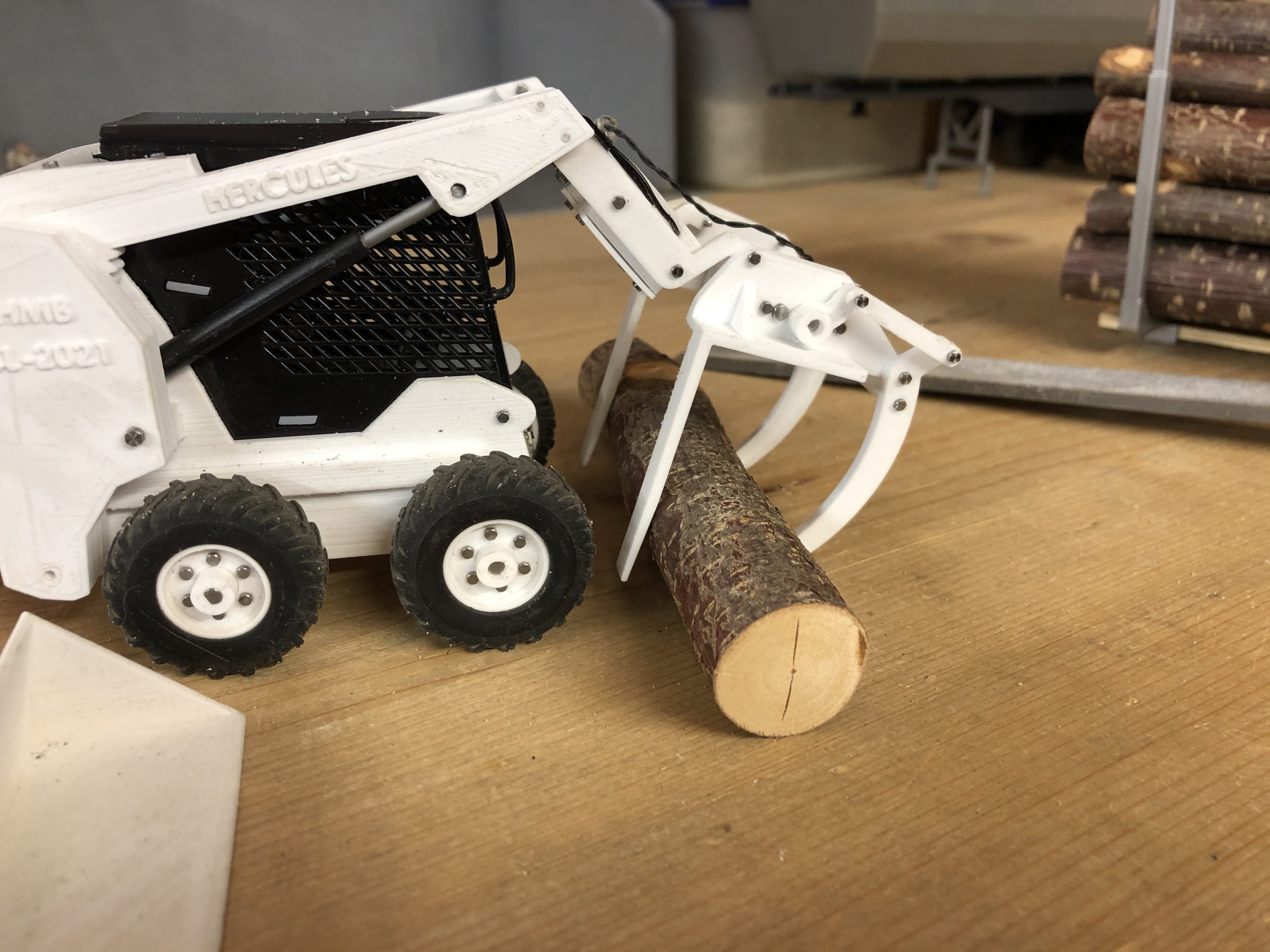
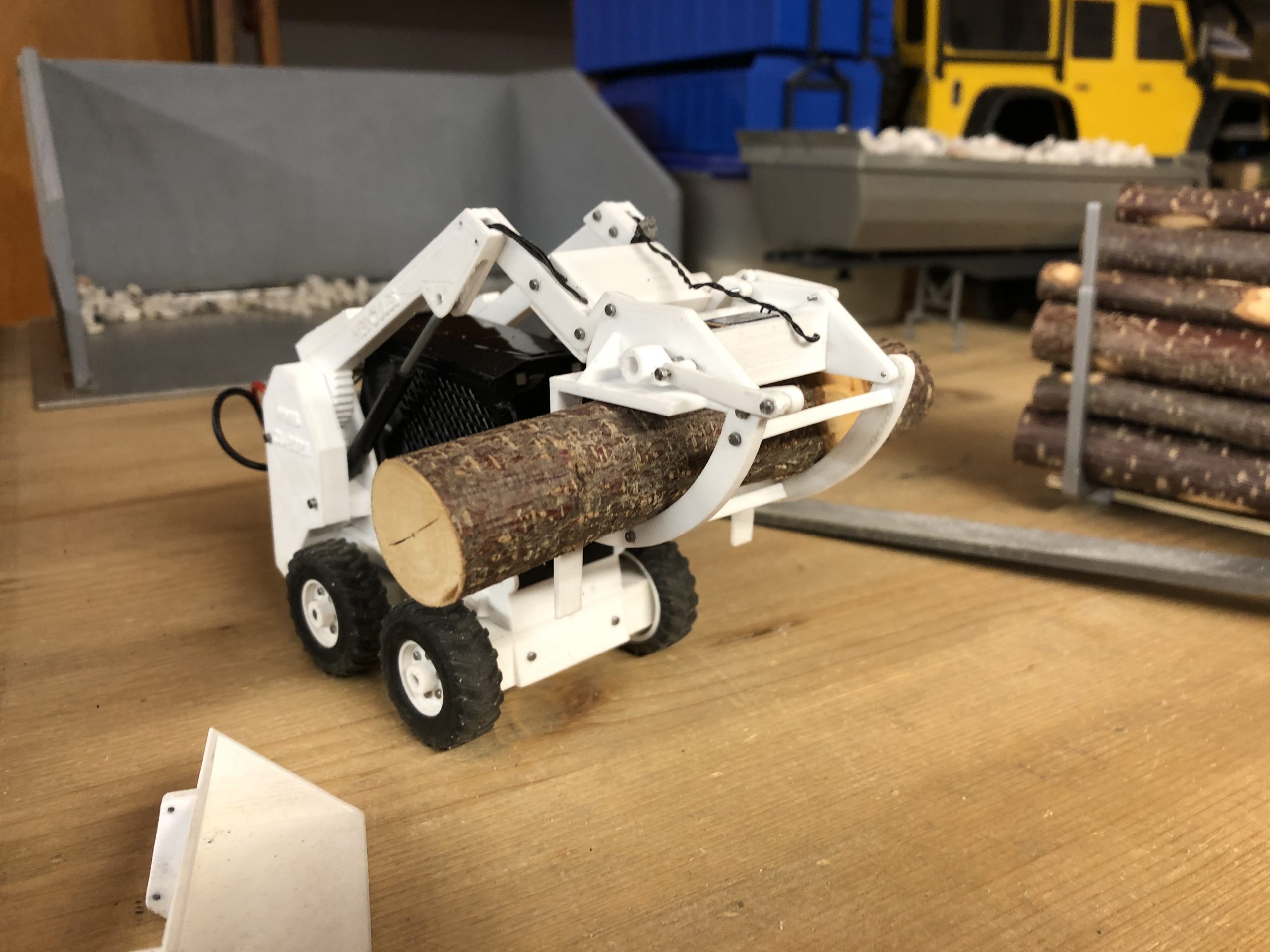
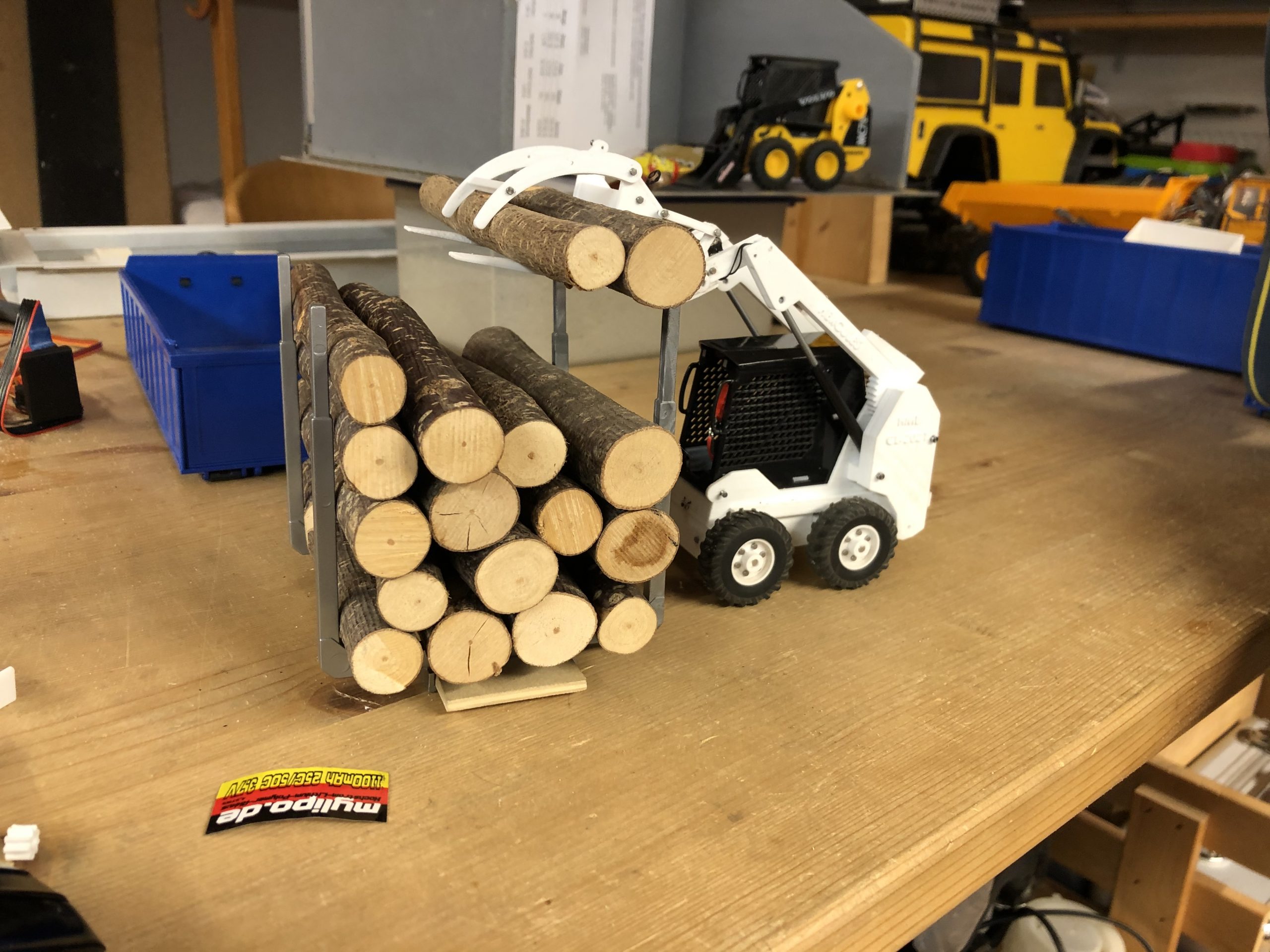
 Das neue Hubgerüst ist auf die Anforderungen mit anderen Modellen im Maßstab 1:25 angepasst und kann nun auch vom Boden aus Muldenkipper beladen.
Das neue Hubgerüst ist auf die Anforderungen mit anderen Modellen im Maßstab 1:25 angepasst und kann nun auch vom Boden aus Muldenkipper beladen.





























































































































































































































































")

")
")
")
")
")
")
")
































")
")
")


")

")
")

")
")
